
Содержание
- ВВЕДЕНИЕ
- 1. АНАЛИЗ ОБЪЕКТА УПРАВЛЕНИЯ
- 1.1 Основные конструктивные, технологические и технико-эксплуатационные характеристики и проблематика объекта управления
- 1.2 Описание движения шара по наклонному желобу
- 1.3 Формализация объекта управления и требования к САУ
- 2. ОБЗОР И АНАЛИЗ ИЗВЕСТНЫХ РЕШЕНИЙ ПО АВТОМАТИЗАЦИИ ОБЪЕКТА
- 2.1 Анализ существующих систем управления
- 2.2 Анализ существующих систем компьютерного зрения
- 2.3 Цели и задачи разработки
- 3. ПРОЕКТИРОВАНИЕ ЛАБОРОТОРНОГО МАКЕТА САУ
- 3.1 Обоснование принятого направления решения задачи работы
- 3.2 Функциональная схема САУ
- 3.3 Выбор и разработка технических средств САУ
- 3.3.1 Выбор микроконтроллера
- 3.3.2 Выбор видео камеры
- 3.3.3 Выбор сервоприводов
- 3.3.4 Выбор ПК
- ВЫВОДЫ
- ПЕРЕЧЕНЬ ССЫЛОК
ВВЕДЕНИЕ
Проектирование, эксплуатация и совершенствование систем автоматического управления, принятие оптимальных решений и нахождение необходимого и правильного способа автоматизации являются сложными задачами, для решения которых нужны квалифицированные специалисты в области управления и моделирования систем. Очевидно, что для подготовки высококвалифицированных специалистов, которые бы имели глубокие теоретические знания и имели практические навыки работы в области электроники, автоматики, а также в области телекоммуникационных систем и сетей, нужно в учебном процессе использовать достаточно простые наглядные пособия и макеты систем автоматики, которые были бы изготовлены при непосредственном участии студентов. Работа студентов над такими проектами, как «Ball and Beam» с использованием web-камеры, даст им возможность на практике использовать теоретические знания, причем в короткий период между услышанным на лекции и практическим применением теории способствует лучшему усвоению изучаемого материала.
1. АНАЛИЗ ОБЪЕКТА УПРАВЛЕНИЯ
1.1 Основные конструктивные, технологические и технико-эксплуатационные характеристики и проблематика объекта управления
Предложенная система, состоящая из шара и желоба, так же называется «Ball and Beam». Чаще всего данная установка встречается в большинстве технических лабораторий. Это связанно с простотой самой конструкции и реализации системы автоматического управления. Данная система позволяет справиться с реальными проблемами такие как горизонтальная стабилизация самолета во время посадки и турбулентного воздушного потока.
Разрабатываемый учебно-лабораторный стенд «Ball and Beam» с использованием web-камеры состоит непосредственно из шара радиусом 20мм, стальной рейки 30см и видеокамеры, которая расположена над желобом таким образом, что захватывает его полностью. Сам желоб с одного края закреплен к неподвижной стойке, а другой – через рычаг к шестерне вала сервопривода, который осуществляет движение желоба. Ниже на рис 1.1 приведена схема установки.
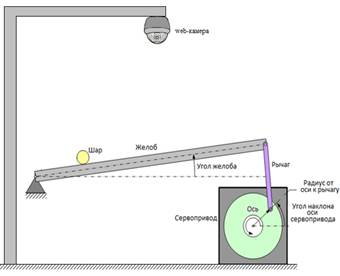
Рисунок 1.1 – Общий вид лабораторного стенда
Управление положением шара на желобе осуществляется посредством изменения угла наклона самого желоба. В данной работе использован алгоритм выделения объекта на изображении по распределению цветовой гаммы. Данный подход достаточно прост и может использоваться для отслеживания объекта цвет которого отличается от фонового. Чтобы выделить шар, фон лабораторной установки будет окрашен одним цветом, тем самым выделив шар.
Необходимо отследить движение шарика на желобе и выделить его какой – либо фигурой. Для этого необходимо провести следующие шаги:
1) выделение пикселей, соответствующих шарику;
2) нахождение контура шарика;
3) построение окружности, в которую попадают все точки контура шарика.
Для изменения угла наклона желоба используется исполнительный механизма (сервопривод или шаговый двигатель), высокой мощности, управление которым реализуется на компьютере через микроконтроллер. Цифровая камера, установленная сверху над желобом, отслеживает объект на желобе и передаёт значение пикселей на компьютер где и вычисляется координата шара в режиме реального времени. И на основе данных координат производится расчёт угла, на который должен наклониться желоб. Изображение передаётся на ПК.
Шарик можно заставить двигаться по любой траектории и даже стабилизировать его. Такой способ управления описывает принцип управления по обратной связи. Цель системы состоит в том, чтобы контролировать и сохранять положение шара в желаемой контрольной точке и компенсировать возмущения.
Для описания системы следует использовать метод пространства состояний. Нелинейность незначительна при малых углах отклонения желоба от горизонтального положения, в этом случае можно просто линеаризовать систему. При больших углах наклона желоба, нелинейность становится более значимой. В этом случае необходимо более тщательно провести аппроксимацию.
1.2 Описание движения шара по наклонному желобу
Для описания движения шара достаточно знать закон движения любой его точки и закон вращения тела относительно этой точки.
Уравнения движения шара, получим при следующих допущениях: шар массой m=0.005[кг] и радиусом R=0.02[м] катится без проскальзывания по двум параллельным направляющим желоба, расстояние между которыми L=0.015[м], установленным под углом
![]() к горизонту на расстоянии
к горизонту на расстоянии
![]() друг от друга [2]. На шар действуют сила тяжести
друг от друга [2]. На шар действуют сила тяжести
![]() , приложенная к центру масс, результирующая
, приложенная к центру масс, результирующая
![]() двух сил реакции со стороны желоба, перпендикулярная наклонной плоскости, образованной направляющими, и проходящая через центр масс шара, а также результирующая
двух сил реакции со стороны желоба, перпендикулярная наклонной плоскости, образованной направляющими, и проходящая через центр масс шара, а также результирующая
![]() двух сил трения покоя [3], действующая вдоль направляющих (рис.1.2).
двух сил трения покоя [3], действующая вдоль направляющих (рис.1.2).
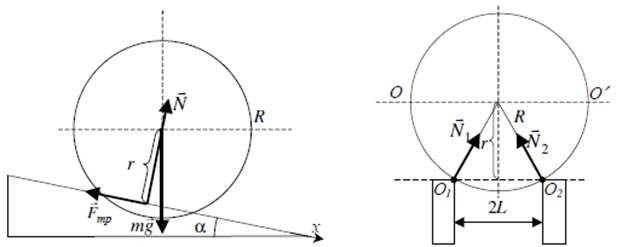
Рисунок 1.2 – Скатывание шара по наклонному желобу
Движение шара описывается системой двух уравнений, на основании [1] (уравнение движения центра масс и уравнение моментов):
 (1.1)
(1.1)
где
![]() - момент инерции шара;
- момент инерции шара;
![]() - плечо силы трения
- плечо силы трения
![]() ;
;
![]() - угловое ускорение, связанное с линейным ускорением уравнением кинематической связи
- угловое ускорение, связанное с линейным ускорением уравнением кинематической связи
![]() .
.
Умножив первое уравнение из (1.1) на
![]() и сложив его со вторым с учетом
и сложив его со вторым с учетом
![]() , получим уравнение движения шара по плоскости при отсутствии проскальзывания в виде:
, получим уравнение движения шара по плоскости при отсутствии проскальзывания в виде:
 (1.2)
(1.2)
Так как в случае шара
![]() и
и
![]() [4], то уравнение (1.2) может быть представлено в виде:
[4], то уравнение (1.2) может быть представлено в виде:
 , при
, при
 . (1.3)
. (1.3)
1.3 Формализация объекта управления и требования к САУ
С учетом выполненного выше анализа особенностей рассматриваемой системы, получена схема основных каналов управления балансировки шара [1] на желобе.
Основной управляемой переменной, характеризующую установку «Ball and Beam», является (рис.1.2) - месторасположение (координата) шара.
Управляющие воздействие, позволяющее требуемым образом влиять на рассмотренное управляемою переменную (рис. 1.2) – угол сервопривода.
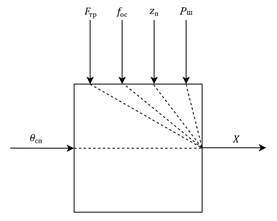
Рисунок 1.3 – Представление установки «Ball and Beam» как объекта управления
Основными возмущениями, влияющие на управляемую переменную, являются переменные(рис.1.2):
– сила трения;
– внешние помехи (ветер, толчок шара рукой и т. д.);
– неравномерность желоба;
– цвет шара и внешнее освещение.
Шарик детектируется на рейке и таким образом выставляется угол поворота исполнительного механизма, желоб двигается, а вместе с ним и начинает движение объект управления.
2. ОБЗОР И АНАЛИЗ ИЗВЕСТНЫХ РЕШЕНИЙ ПО АВТОМАТИЗАЦИИ ОБЪЕКТА
2.1 Анализ существующих систем управления
Рассматриваемая система «Ball and Beam» с использованием web-камеры представляет собой простую конструкцию, для визуального наблюдения всех правил классической теории автоматического управления. Раннее, данная система, только без использования компьютерного зрения, была сконструирована и продемонстрирована многими организациями.
Ещё в 1999 году Hirsch построил свою «Ball on Beam System». Фотография системы представлена (рис. 2.1). В системе использовался ультразвуковой датчик для измерения положение мяча. Угол поворота измерялся при использовании потенциометра. Двигатель с коробкой передач приводился в действие мощным операционным усилителем цепи. Система управлялась ПД контроллером. Большинство аналогов систем используют такой тип конфигурации, как Hirsch.
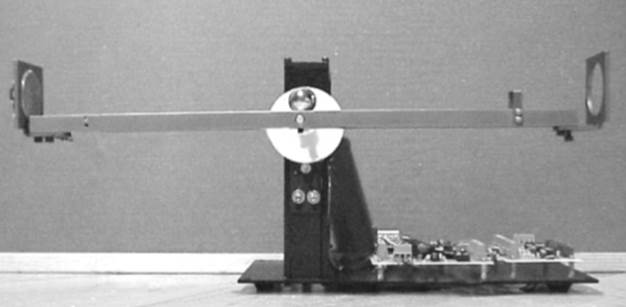
Рисунок 2.1 – Система «Ball on Beam System»
Компания «Arroyo» построила систему под названием «Ball on Balancing Beam» в 2005 году (рис. 2.2). В системе использовался резистивный датчик для измерения положения шарика. Резистивный датчик положения действовал как стеклосчистыватель, подобный потенциометру в результате чего было известно положение шара. Использовался двигатель постоянного тока с редуктором. Система контролировалась также с помощью ПД контроллера.

Рисунок 2.2 – Система «Ball on Balancing Beam»
Эта система была легко построена, и ПД контроллер был прост в разработке. Недостатком системы «Ball on Balancing Beam» заключалось то, что желоб был сделан из акрила, который слишком хрупким для внезапного удара и самого соприкосновения с шаром. Кроме того, угол наклона желоба не измерялся и не контролировался. Хотя, положение шара контролировалось ПД контроллером. С технической точки зрения система была не очень надежной.
Кафедра электротехники в университете Лейкхед построила систему под названием «Ball and Beam Balancer» в 2006 году (рис. 2.3). В системе использовался двигатель постоянного тока со встроенным редуктором, резистивный датчик положения и цифровой кодер. Система контролировалась контроллером LQR.

Рисунок 2.3 – Система «Ball and Beam Balancer»
Система «Ball and Beam Balancer» имела один вход (вход напряжения двигателя) и два выхода (положение шара и угол наклона желоба). Система была очень надежной, поскольку метод пространства состояний с контроллером LQR хорош в управлении системой MIMO (множественный вход, множественный выход). Конструкция системы «Ball and Beam Balancer» была тяжелой, потому что желоб был из алюминия, который намного тяжелее акрила
Параллельно с университетом Лейкхед, компания Quanser представляет свой коммерческий продукт под названием «Ball and Beam Module» (рис. 2.4). Модуль состоял из датчика положения, выполнен резистивными проводами и серводвигателем постоянного тока с уменьшенной коробкой передач. Система может управляться ПИД-регулятором или контроллером пространства состояний. Относительный малый мотор можно использовать для системы из-за эффекта плеча.

Рисунок 2.4 – Система «Ball and Beam Module» производства Quanser
Компанией Quanser так же была предложена похожая САУ шариком только не на желобе, а на платформе, именуемая 2DOF Ball Balancer. Данная реализация представлена на рис.2.5.

Рисунок 2.5 – Система управления, представленная лабораторией
Quanzer
Данная платформа состоит из пластины, на которой должен находится шарик, двух сервоприводов производства лаборатории Quanzer, которые подключены к боковым сторонам пластины, а также камеры высокого разрешения. Пластина может поворачиваться в любом направлении. Контролируя положение шестерёнок сервоприводом можно регулировать положение пластины, чтобы сбалансировать шарик до желаемой позиции. С помощью программного обеспечения можно задавать траекторию шарика, используя микроконтроллер. С точки зрения управления данный лабораторный стенд реализует принцип управления по обратной связи. Данный стенд полностью удовлетворяет цели данной работы. Недостатком данной системы является цена и платное программное обеспечение компании Quanzer.
На основании анализа существующих систем балансирования шарика на желобе и на платформе, был осуществлён выбор собственной реализации данного стенда, используя опыт предыдущих разработок и компилируя их. В качестве принципа управления был выбран принцип обратной связи, так как именно он наиболее подходит для реализации системы. Так как нам необходимо регулировать угол поворота сервопривода на основании принятой от камеры информации.
2.2 Анализ существующих систем компьютерного зрения
Для лабораторного макета следует проанализировать существующие алгоритмы компьютерного зрения. В настоящее время, для наблюдения за объектами с помощью видеокамеры предложены библиотеки: OpenCV, PCL (Point Cloud Library) и JMyron. Каждая из данных библиотек имеет свои особенности, свои алгоритмы. Рассмотрим каждую по очереди.
OpenCV - библиотека алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения. Преимущественно используется в рамках языка C/C++.
Алгоритм детектирования объекта можно представить последовательностью следующих операций:
1. Получение кадра с камеры;
2. Конвертация изображения из RGB в HSV;
3. Пропускание через маску некоторого цвета;
4. Расчет моментов изображения.
Ниже приведен пример реализации детектирования объекта при помощи библиотека OpenCV.

Рисунок 2.6 – Детектирование объекта при помощи OpenCV
Как видно из рисунка все объекты вокруг обесцвечиваются, и камера видит только лишь необходимый для трекинга объект, определённого цвета.
Данная библиотека имеет достаточно сложную программную реализацию в виду её написания на языке C/C++. Преимущество её в том, что она лучше описывает алгоритм выделения цвета необходимого объекта.
PCL (Point Cloud Library) – открытый проект, позволяющий обрабатывать изображения в двух- и трехмерном пространстве. Библиотека PCL содержит высококлассные алгоритмы оценки объектов, реконструкции поверхности, 3D регистрации, подгонки моделей и сегментации.
Приведём примеры реализаций данной библиотеки.
Из рис. 2.7 мы видим, что библиотека PCL является достаточно сложной, так как детектирование происходит по трём координатным осям.
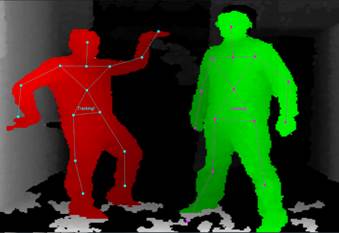
Рисунок 2.7 – Детектирование 3D изображения средствами PCL
На рис. 2.8 изображены объекты, которые распознала библиотека компьютерного зрения PCL. Проведя анализ рисунка, мы видим, что облако точек очень точно распознаёт видимые объекты. Мы можем более детально их рассмотреть в отличии от плоского изображения.
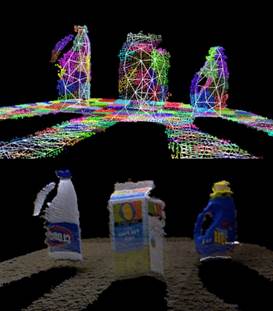
Рисунок 2.8 – Распознавание объектов в 3D виде с помощью PCL
Достоинством применения PCL является то, что объект можно поворачивать, увеличивать или уменьшать [5]. Облако точек намного точнее, чем обыкновенный чертеж и позволяет наглядно доступно рассмотреть 3D-геометрическую модель для последующей обработки по необходимым требованиям. Недостатком же является необходимость использования более мощного, а значит более дорогого оборудования.
Библиотека компьютерного зрения JMyron на языке программирования Processing. Данная библиотека имеет достаточно простые алгоритмы для реализации компьютерного зрения, она имеется в открытом доступе. В языке программирования Processing имеется библиотека для взаимодействия с микроконтроллером Arduino, что является одним из главных преимуществ. Оно состоит в том, что и Arduino, и Processing имеют достаточно простой интерфейс и программный код, схожий с языком программирования Java.
Приведём примеры для трекинга объектов средствами библиотеки JMyron.
Приведём примеры реализаций данной библиотеки.
На рис. 2.9 можно заметить, что при помощи библиотеки компьютерного зрения JMyron можно детектирования лица.
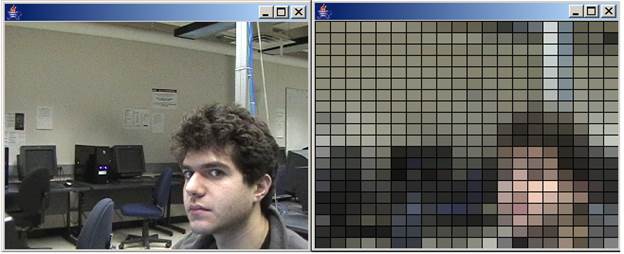
Рисунок 2.9 – Детектирование лица средствами JMyron
Однако в данной библиотеки существует ряд недостатков. Один из главных – это то, что эта библиотека крайне чувствительна к освещению. Для неё необходим подбор правильной комнаты с нужным освещением для правильного детектирования объекта.
Анализируя существующие библиотеки компьютерного зрения, в рамках данной работы была выбрана библиотека OpenCV, так как она наиболее точно удовлетворяет техническому заданию работы. Ввиду точного детектирования объекта на желобе можно получить точное значение координаты для ее регулирования и передачи на исполнительный механизм.
2.3 Цели и задачи разработки
Проведенный выше анализ особенностей и характеристик установки «Ball and Beam» как объекта управления позволяет сформулировать основную цель проекта - сконструировать и контролировать реальную систему «Ball and Beam». В частности, цели перечислены в следующем:
– создать учебно-лабораторный стенд;
– идентифицировать и определять параметры системы;
– реализовать различные алгоритмы управления;
– использовать сконструированные контроллеры для управления реальной установкой и сравните полученные характеристики.
Для достижения поставленной цели, необходимо выполнить следующие задачи:
1) задача проектирования – подобрать качественную видеокамеру, исполнительный механизм и контроллер с требуемым классом точности;
2) задача для управления - добиться быстродействия и высокой чувствительности системы, для достижения желаемых результатов;
3) информационная задача – обеспечить непрерывную двустороннюю связь объекта управления с диспетчерским пунктом (персональный компьютер);
4) задача для реализации функций защиты – выбрать для создания лабораторного стенда надежные материалы, а также обеспечить безопасные условия студентам для работы со стендом.
3. ПРОЕКТИРОВАНИЕ ЛАБОРОТОРНОГО МАКЕТА САУ
3.1 Обоснование принятого направления решения задачи работы
Для достижения поставленной цели было принято решение скомпилировать две разработки лаборатории Quanzer это Ball and Beam Module и 2DOF Ball Balancer. Необходимо реализовать учебно-лабораторный стенд, который должен состоять из: желоба, на котором будет осуществляться движение шара, сервопривода, которые будут наклонять рейку, в зависимости от координаты шарика на ней и видеокамеры, которая будет фиксировать шар на желобе. Важно то, чтобы точка соприкосновения с плечом сервопривода была совмещена с неподвижной точкой закрепленного желоба. Сервопривод должен быть установлен в среднее положение (90 градусов), и высота его должна быть отрегулирована таким образом, чтобы плечо было в горизонтальном положении, когда желоб находится в горизонтальном положении. Web-камера должна располагаться так, чтобы смотрела точно на центр желоба и захватывать всю его длину. Для того чтобы детектирование шара было проще, необходимо создать сильный контраст между внешним фоном лабораторного стенда и шара. В качестве алгоритма компьютерного зрения была выбрана библиотека OpenCV на языке программирования C++.
3.2 Функциональная схема САУ
Функциональная схема установки представлена на рис. 3.1:

Рисунок 3.1 – Функциональная схема системы автоматического управления
Опишем каждый из компонентов системы.
Web-камера фиксирует в реальном времени изображение и передаёт его на персональный компьютер.
Персональный компьютер выполняет обработку изображения, переданного с web-камеры. Здесь же реализован алгоритм компьютерного зрения и необходимые для работы регуляторы. C камеры компьютер получает изображение в виде набора пикселей. Компьтер получает одну координату, вторая – константа, так как шарик двигается по одному направлению. Далее создается перекрестие, по координатам которой вычисляется центр шара на желобе с точностью до единиц пикселей. По полученным координатам объекта на плоскости ПК вычисляет угол, на которые должен повернуться привод, чтобы выполнить необходимую. Значение угла передается на микроконтроллер Arduino.
Микроконтроллер Arduino обеспечивает связь ПК с приводом. Arduino Uno подключен к ПК с помощью USB – UART. Угол, вычисленные на компьютере в виде соответствующего кода, передаются на плату Arduino, которая в свою очередь заставляет приводы поворачиваться на этот угол.
Исполнительные механизм – сервопривод, подключенный непосредственно к плате Arduino Uno, необходим для наклона желоба, на котором балансируется шар.
Объект управления – шар, который движется по желобу. Движение шара, а также его положение фиксируется web-камерой.
3.3 Выбор и разработка технических средств САУ
В качестве технических средств в данном проекте, были выбраны следующие комплектующие:
- плата Arduino Uno – микроконтроллер через который происходит управление сервоприводом;
- в качестве исполнительного механизма используется сервопривод, которые осуществляют наклон желоба;
- цифровая видеокамера, которая осуществляет детектирование шарика на балансирующем желобе;
- персональный компьютер, в котором реализован алгоритм управления.
3.3.1 Выбор микроконтроллера
В современном мире предложено большое количество микроконтроллеров от разных производителей. При выбранной реализации стенда необходим контроллер, имеющий в наличии цифровые входа/выхода, с рабочим напряжением не более 5В, так как необходимо обеспечить питание контроллера от ПК. Так же контроллер должен быть доступным по цене и обеспечивать лёгкость при его программировании. Анализируя рынок микроконтроллеров был выбран микроконтроллер Arduino Uno (рис.3.2).
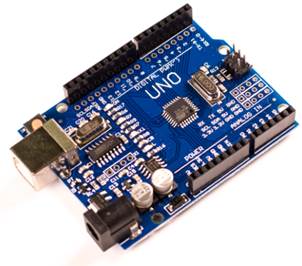
Рисунок 3.2 – Внешний вид платы Arduino Uno
При выбранной реализации учебно-лабораторного стенда именно плата Arduino Uno является наиболее оптимальной [9]. Arduino Uno — это устройство на базе микроконтроллера ATmega328. В его состав входит все необходимое для работы с микроконтроллером: 14 цифровых входов/выходов (из них 6 могут использоваться в качестве ШИМ-выходов), 6 аналоговых входов, кварцевый резонатор на 16 МГц, разъем USB, разъем питания, разъем для внутрисхемного программирования (ICSP) и кнопка сброса. Для начала работы с платой достаточно просто подать питание от AC/DC-адаптера или батарейки, либо подключить его к компьютеру посредством USB-кабеля.
Технические характеристики Arduino Uno приведены в таблице 3.1.
Таблица 3.1 – Технические характеристики Arduino Uno
|
Технический параметр |
Значение параметра |
|
Рабочее напряжение, В |
5 |
|
Входное напряжение (рекомендованное), В |
7 – 12 |
|
Входное напряжение (предельное), В |
6 - 20 |
|
Цифровые входов/выходов, шт |
14 |
|
ШИМ входов/выходов, шт |
6 |
|
Аналоговых входов/выходов, шт |
6 |
|
Максимальный ток одного вывода, мА |
20 |
|
Максимальный выходной ток вывода 3.3В, мА |
50 |
|
Flash – память, Кбайт |
32 |
|
Энергозависимая память (SRAM), Кбайт |
2 |
|
Энергонезависимая память (EEPROM), Кбайт |
1 |
|
Частота процессора, МГц |
16 |
|
Длина, мм |
68,6 |
|
Ширина, мм |
53,4 |
|
Вес, г |
25 |
3.3.2 Выбор видео камеры
Техническим заданием на проект предусматривается использование видеокамеры как информационно-измерительной системы для определения координат положения шара на плоскости. Необходима камера, имеющая достаточно большое разрешение для захвата в кадр всего желоба. В проекте будем использовать цифровую камеру высокого разрешения Gembird CAM100U (рис.3.3).

Рисунок 3.3 – Внешний вид web-камеры Gembird CAM100U
Данная камера достаточно дешёвая и удовлетворяет требованиям для решения поставленной задачи.Технические характеристики Gembird CAM100U [10] приведены в таблице 3.2.
Таблица 3.2 – Технические характеристики Gembird CAM100U
|
Технический параметр |
Значение параметра |
|
Разрешение видео |
|
|
Фокусировка |
Ручная |
|
Частота кадров в секунду |
60 |
|
Объектив,Мп/интерполяция до, Мп |
0,3/16 |
|
Интерфейс |
USB 2.0 |
|
Вес, г |
80 |
Для оценки требуемого быстродействия системы измерения координат шара необходимо определить возможное минимальное время пребывания шара на наклонной плоскости. Запишем следующее уравнения движения шара по наклонному желобу при отсутствии проскальзывания, на основании [4]:
 (3.1)
(3.1)
где
![]() - момент инерции шара;
- момент инерции шара;
![]() - плечо силы трения
- плечо силы трения
![]() ;
;
![]() - угловое ускорение, связанное с линейным ускорением уравнением кинематической связи
- угловое ускорение, связанное с линейным ускорением уравнением кинематической связи
![]() .
.
Так как в случае шара
![]() и
и
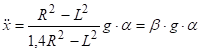
![]() [4], то уравнение (3.1) может быть представлено в виде:
[4], то уравнение (3.1) может быть представлено в виде:
 , при
, при
 , (3.2)
, (3.2)
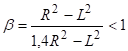
![]()
Условие выполнено:
![]() ,
,
![]()
Следовательно,
![]() (3.3)
(3.3)
где
![]() – угол наклона плоскости;
– угол наклона плоскости;
g = 9,8 мс – ускорение свободного падения.
Предполагая, что шар находится в любом месте на желобе, который наклоненной по отношению к горизонтальной плоскости на угол 150, на основании (3.3) легко рассчитать время, за которое шар, если его начальная скорость была равна нулю. Это время составит порядка 0,88 с.
Таким образом, в дальнейших расчетах следует принимать за минимальное время пребывания шара на плоскости время
![]() .
.
3.3.3 Выбор сервоприводов
Согласно функциональной схеме (3.1) в разрабатываемой САУ движением шара по наклонному желобу в качестве исполнительного устройства будет используется сервопривод.
При выборе сервоприводов необходимо руководствоваться очень важными характеристиками сервопривода, а именно крутящим моментом и скоростью поворота.
Момент силы, или крутящий момент(M) — векторная физическая величина, равная произведению радиус-вектора (
![]() ), проведенного от оси вращения к точке приложения силы, на вектор этой силы (F). Характеризует вращательное действие силы на твёрдое тело.
), проведенного от оси вращения к точке приложения силы, на вектор этой силы (F). Характеризует вращательное действие силы на твёрдое тело.
![]() (3.4)
(3.4)
В разрабатываемом лабораторном стенде предусмотрено наличие рычага, длина которого составляет
![]()
Данная характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Разрабатываемая установка не будет оказывать большой груз на сервопривод, т.к. масса шара составляет mш=0.005[кг]
и масса самого желоба mж =0.150[кг]. Суммарный груз (
![]() ), который необходимо будет удерживать сервоприводу:
), который необходимо будет удерживать сервоприводу:
![]() (3.5)
(3.5)
Вторая характеристика, которую необходимо учитывать, это скорость поворота вала двигателя. Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Эта характеристика более важна в нашем случае, т.к. необходимо достигнуть быстродействия исполнительного устройства (сервопривода).
Ещё один фактор, который необходимо учесть – это то, что сервопривод будет питаться от, ранее выбранной, микроконтроллерной платы Arduino Uno у которой рабочее напряжение 5В.
При анализе рынка данных механизмов выбор остановился на фирме Dsservo. Был выбран сервопривод модели DS3218 (рис.3.4).

Рисунок 3.4 – Внешний вид сервопривода Dsservo DS3218
Следует обратить внимание на напряжение, которое подается на сервопривод, если оно превысит допустимое, зубчатые колеса провернутся до положения, превышающего максимальному, что повлечет неспособность механизма продолжать движение в обратном ходе. Неисправность мотора не произойдет, но механическая часть сервопривода будет повреждена.
Технические характеристики сервопривода Dsservo DS3218 [11] приведены в таблице 3.3.
Таблица 3.3 – Технические характеристики Dsservo DS3218
|
Технический параметр |
Значение параметра |
|
Рабочее напряжение, В |
4,8 - 6,8 |
|
Угол поворота, º |
0 - 180 |
|
Угловая скорость |
0,16сек/60º |
|
Пусковой момент, кг/см |
19 |
|
Материал шестеренок |
металл |
|
Габаритные размеры, мм |
40 × 20× 40,5 |
|
Вес, г |
65 |
Выбранный сервопривод Dsservo DS3218, удовлетворяет двум главным характеристикам, при этом пусковой момент 19 кг/см, говорит о том, что сервопривод удержит на весу в горизонтальном положении рычаг длиной 1 см, на свободный конец которого можно подвесить
19 кг, что намного превышает ранее рассчитанный суммарный груз (
![]() ).
).
3.3.4 Выбор ПК
В качестве системы, которая реализует алгоритм управления будем использовать персональный компьютер. Требования к программному и системному обеспечению компьютера:
- процессор с частотой 1,6 ГГц и выше;
- не менее1 ГБ оперативной памяти (при работе на виртуальной машине – минимум 1,5 ГБ);
- видеокарта с поддержкой разрешение не менее 1024 х 768 пикселей;
- DirectX 9.0c или выше;
- Windows Vista,Windows 7, Windows 8 или Windows 10.
На ПК необходима установка нужного программного обеспечения, в частности: VisualStudio 2012 и библиотеку OpenCV (для программирования самой системы), Arduino (для программирования микроконтроллера), WebCam driver.
ВЫВОДЫ
По результатам работы можно сделать следующие выводы.
1. Проведен анализ объекта управления – движение шара по желобу. Обоснованы факты для создания системы автоматизации, сформулированы цели, описаны функции и задачи системы автоматизации учебно-лабораторного стенда.
2. Осуществлен выбор концепции для разработки системы автоматического управления балансировки шара на желобе для лабораторного стенда. В работе показано, что наиболее подходящей для реализации САУ является концепция, основанная на управлении месторасположением шара на желобе за счет изменения угла поворота сервопривода.
3. Выполнен выбор технических элементов, позволяющих полностью реализовать необходимые функции САУ. В качестве информационно-измерительной устройства выбрана цифровая камера высокого разрешения Gembird CAM100U. Исполнительное устройство – сервопривод Tower Pro MG90S. Для связи между выбранными элементами и ПК выбрана микроконтроллерная плата Arduino Uno.
4. Построена функциональная схема САУ, выделены основные компоненты системы и проведён анализ их работы.
Таким образом, выбранный комплекс технических средств САУ движением шара по наклонному желобу с использованием компьютерного зрения вместе с разработанными алгоритмами позволяет полностью реализовать необходимые функции контроля и управления.
ПЕРЕЧЕНЬ ССЫЛОК
1. Левин М.Е., Рыженков В.М. Балансировка деталей и узлов. – М.: Машиностроение, 1986. – 248с.
2. Методы классической и современной теории автоматического управления: учебник в 5 томах., Т3: Синтез регуляторов систем автоматического управления. Под ред. Н.Д.Егупова.- М.: изд.МГТУ им. Н.Э.Баумана, 2004. -617c.
3. Лукас, В.А. Теория автоматического управления. / В. А.Лукас – М.: Недра, 1990. – 416 с.
4. Митин И.В. Задача № 125 Изучение движения шара по наклонному желобу. Лабораторный практикум по физике. Механика. Москва, 2011. [Электронный ресурс] URL: http://genphys.phys.msu.su/rus/lab/mech/Lab125_1.pdf (дата обращения: 15.11.2018).
5. Форсайт Д., Понс Ж. Компьютерное зрение. Современный подход. – М.: Вильямс, 2004 г. – 928 с.
6. Глория Буэно Гарсия. Обработка изображений с помощью OpenCV, 2016. – 210 c..
7. Филлипс, Ч. Системы управления с обратной связью. / Ч. Филлипс, Р. Харбор - М.: Лаборатория Базовых знаний.- 2001 - 616 с.
8. Двигатель постоянного тока [Электронный ресурс]: URL: http://el-mashin.narod.ru/text/53.html (дата обращения: 11.12.2018).
9. Микроконтроллерная плата. [Электронный ресурс] URL: http://arduino.on.kg/Arduino-UNO (дата обращения: 18.12.2018).
10. Информационно-измерительное устройство. [Электронный ресурс] URL: https://www.gembird.ua/0602071.html (дата обращения: 18.12.2018).
11. Сервопривод. [Электронный ресурс] URL:
http://www.zi-zi.ru/mechanism/motor-mg90s
(дата обращения: 18.12.2018).